こんにちは。15のアークです。
9/3(土)に第4回GAME^3を開催しました!
場所は東工大大岡山キャンパスS223講義室で行いました。
GAME^3(ゲームキューブと読みます)とは、「ゲーム展示と製作者同士の交流」を目的としたゲーム製作者交流会です。

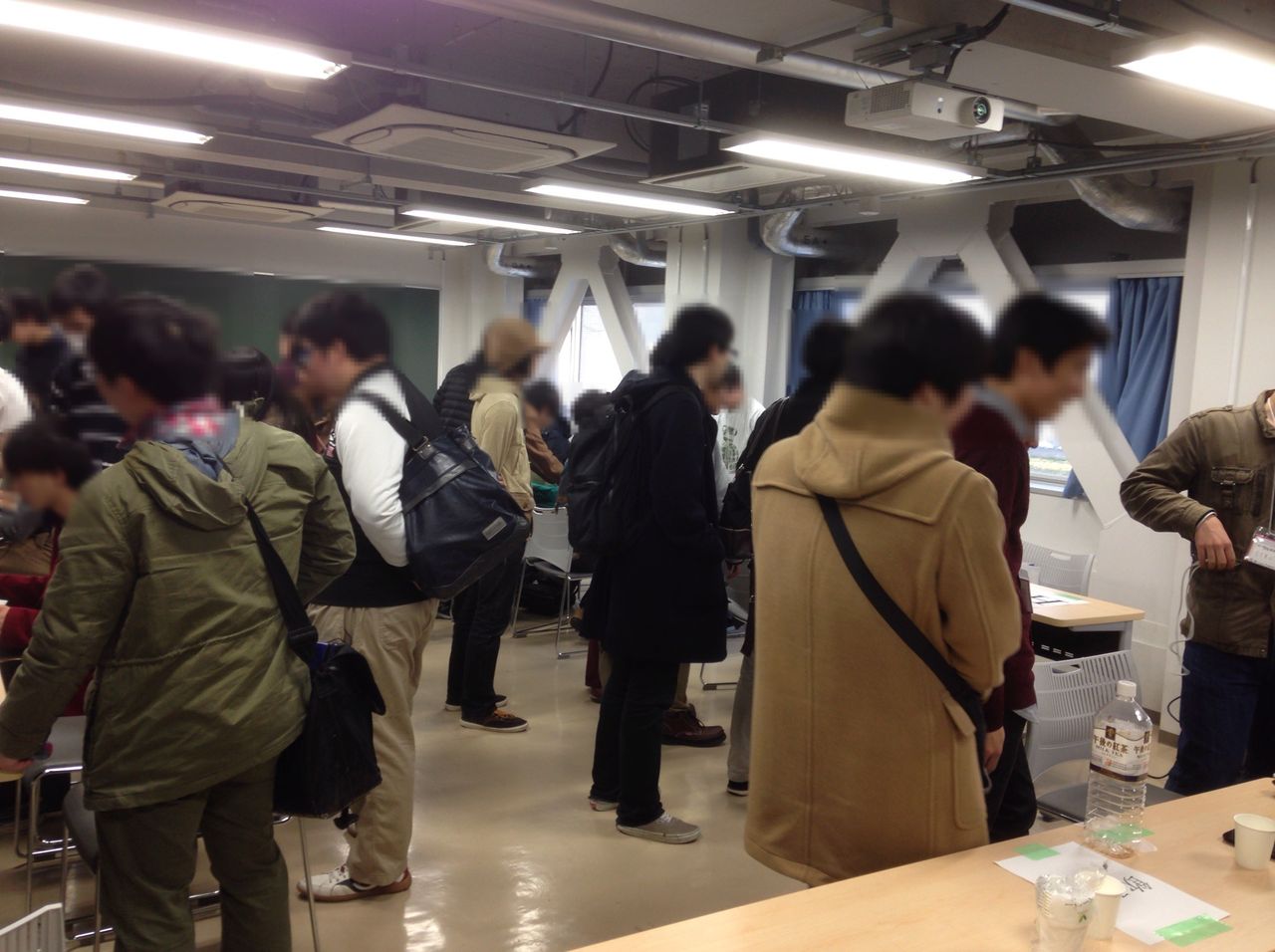
来場者数はおよそ50名ほど、展示ゲームブース数は19ブースでした!
ゲームを展示したり、ゲームを遊んだり、ゲーム制作について議論をしたりと盛り上がりました。
この機会にゲーム製作者どうしの交流の輪が広まってくれたらいいなと思います。
ゲーム展示者の方々や当日遊びに来られた方々には本当に感謝しています。ありがとうございました。
(ここに当日の様子の写真を載せたいところなのですが、写真を取るのを忘れてしまいました。ごめんなさい。)
当日のアンケートによる人気ゲームの投票結果は次のようになりました。
第1位 ミツボシクリエイターズ ミツゴロウさんの『AI Paint』
第2位 ノンリニアさんの『ぎみっくぷらいむ!』
第3位 東京工業大学ゲーム制作サークルtraP ninjaさんの『Block Filling』
アンケートでは、「楽しかった」「またGAME^3を開催して欲しい」という声もあり、第5回GAME^3も開催できたらいいなと思います。次回も是非ご参加下さい。
質問等がございましたら、こちら(gamemakers.conference.game3@gmail.com )までご連絡ください。
GAME^3公式wikiはこちら
GAME^3公式Twitterアカウント @GAME3_Staff
第1回の記事はこちら
第2回の記事はこちら
第3回の記事はこちら
9/3(土)に第4回GAME^3を開催しました!
場所は東工大大岡山キャンパスS223講義室で行いました。
GAME^3(ゲームキューブと読みます)とは、「ゲーム展示と製作者同士の交流」を目的としたゲーム製作者交流会です。
来場者数はおよそ50名ほど、展示ゲームブース数は19ブースでした!
ゲームを展示したり、ゲームを遊んだり、ゲーム制作について議論をしたりと盛り上がりました。
この機会にゲーム製作者どうしの交流の輪が広まってくれたらいいなと思います。
ゲーム展示者の方々や当日遊びに来られた方々には本当に感謝しています。ありがとうございました。
(ここに当日の様子の写真を載せたいところなのですが、写真を取るのを忘れてしまいました。ごめんなさい。)
当日のアンケートによる人気ゲームの投票結果は次のようになりました。
第1位 ミツボシクリエイターズ ミツゴロウさんの『AI Paint』
第2位 ノンリニアさんの『ぎみっくぷらいむ!』
第3位 東京工業大学ゲーム制作サークルtraP ninjaさんの『Block Filling』
アンケートでは、「楽しかった」「またGAME^3を開催して欲しい」という声もあり、第5回GAME^3も開催できたらいいなと思います。次回も是非ご参加下さい。
質問等がございましたら、こちら(gamemakers.
GAME^3公式wikiはこちら
GAME^3公式Twitterアカウント @GAME3_Staff
第1回の記事はこちら
第2回の記事はこちら
第3回の記事はこちら