こんにちは、めかとろの玩具箱の州すけです。
新入生歓迎展示で展示していたライントレースロボットです。とりあえずひとまずの完成となりました。
家では問題なく動いていたのですが、展示では講義室の照明が明るかったためかうまく動いてくれず、動画を流しているだけという結果になってしまいました。

現在のプログラムでは動作前に白い場所において白地のデータを読み取りそれを基準値とし、ライントレース中に取得した値と基準値との差分の定数倍をPWM最大値から引いて出力するという構成になっています。
pwm=MAX-k(基準値-取得値)
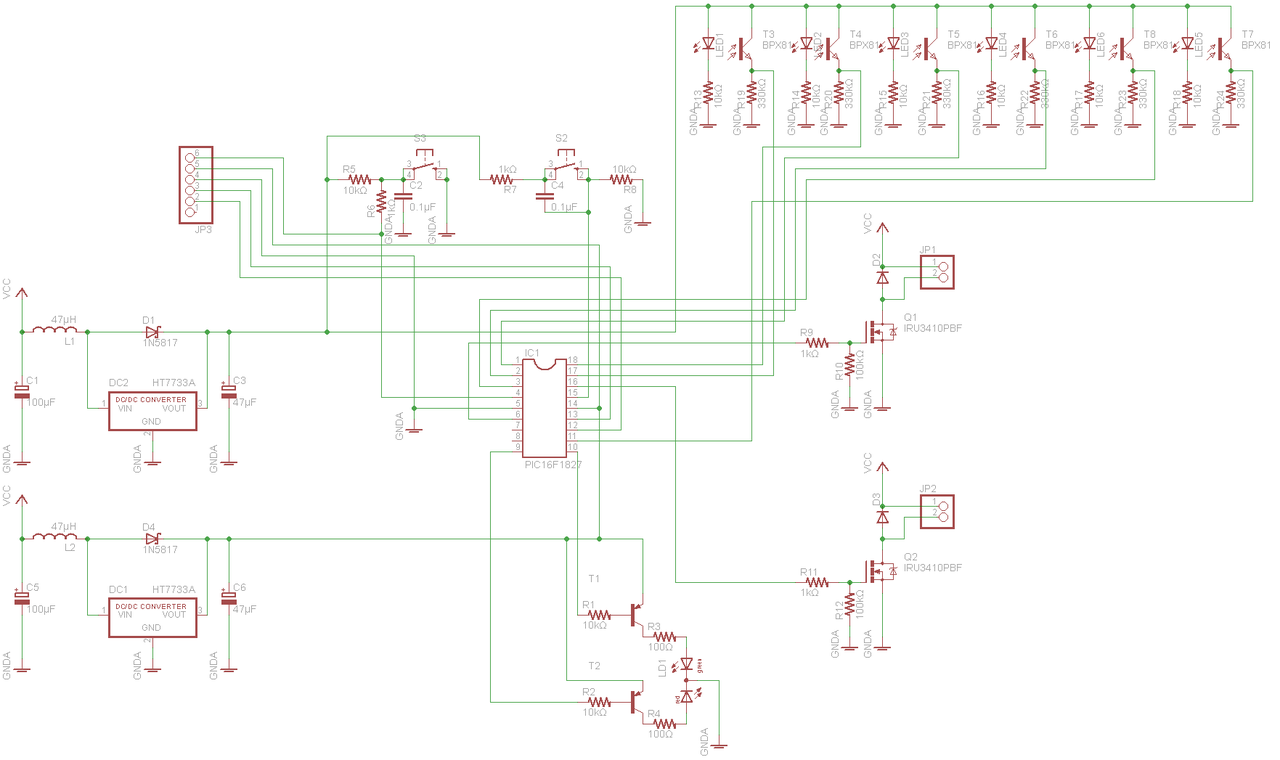
のような感じ。センサは6つついているため、
pwm左=MAX-k1(基準値左1-取得値左1)-k2(基準値左2-取得値左2)-k3(基準値左3-取得値左3)
pwm右=MAX-k4(基準値右1-取得値右1)-k5(基準値右2-取得値右2)-k6(基準値右3-取得値右3)
みたいな感じになっています。
線を見ているセンサがある方のタイヤが減速するイメージです。
これからは微分制御を加えることと、外乱光の対策に始めに黒の値を取得して走行時の値との比を扱うことを考えています。
また今回は消費電力が大きかったために電池がモーターを別にせざるを得なかったため、そこをどうにかして2本にしたいなと思っています。
それではまた来月お会いしましょう。
新入生歓迎展示で展示していたライントレースロボットです。とりあえずひとまずの完成となりました。
家では問題なく動いていたのですが、展示では講義室の照明が明るかったためかうまく動いてくれず、動画を流しているだけという結果になってしまいました。
現在のプログラムでは動作前に白い場所において白地のデータを読み取りそれを基準値とし、ライントレース中に取得した値と基準値との差分の定数倍をPWM最大値から引いて出力するという構成になっています。
pwm=MAX-k(基準値-取得値)
のような感じ。センサは6つついているため、
pwm左=MAX-k1(基準値左1-取得値左1)-k2(基準値左2-取得値左2)-k3(基準値左3-取得値左3)
pwm右=MAX-k4(基準値右1-取得値右1)-k5(基準値右2-取得値右2)-k6(基準値右3-取得値右3)
みたいな感じになっています。
線を見ているセンサがある方のタイヤが減速するイメージです。
これからは微分制御を加えることと、外乱光の対策に始めに黒の値を取得して走行時の値との比を扱うことを考えています。
また今回は消費電力が大きかったために電池がモーターを別にせざるを得なかったため、そこをどうにかして2本にしたいなと思っています。
それではまた来月お会いしましょう。