こんにちはたのしいロボット帝国の髙田です.
明日,明後日,「かわさきロボット競技大会」略して「かわロボ」に12の藤岡さんと参加してきます.
公式HP
かわロボとは,リング上で2機のロボットが,互いに相手をリング外に押し出すか,ひっくり返してダウンを取るかで勝負するものです.全てのロボットはリンク機構の足,腕機構を有していなければなりません.
今回,出場する機体はこちら
明日,明後日,「かわさきロボット競技大会」略して「かわロボ」に12の藤岡さんと参加してきます.
公式HP
かわロボとは,リング上で2機のロボットが,互いに相手をリング外に押し出すか,ひっくり返してダウンを取るかで勝負するものです.全てのロボットはリンク機構の足,腕機構を有していなければなりません.
今回,出場する機体はこちら
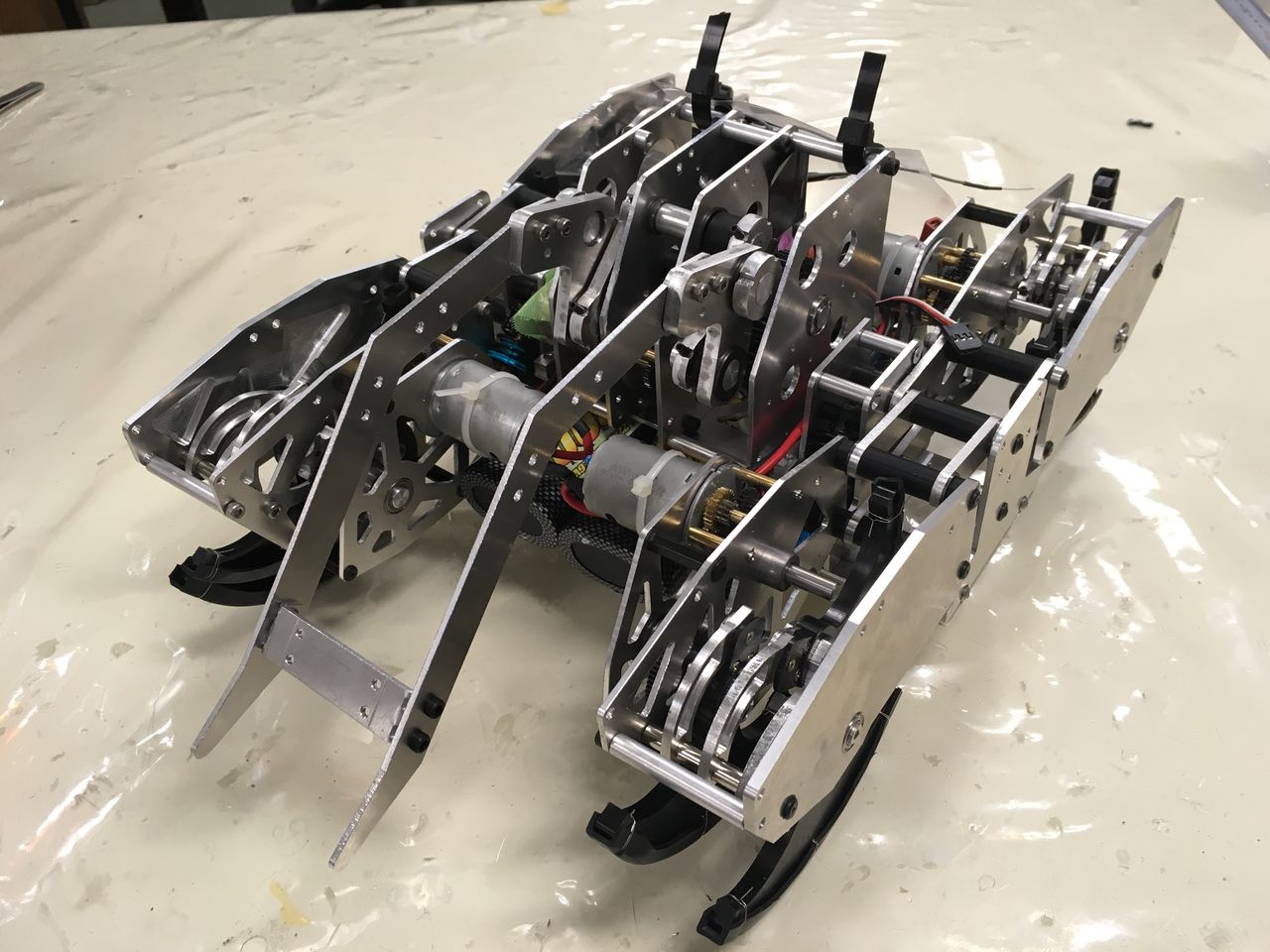
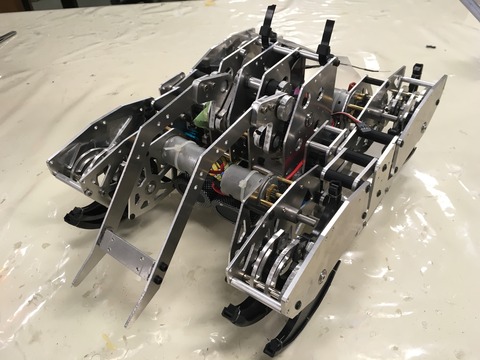
「TITAN - XIV」
TITANシリーズは東工大広瀬研で創られてきた歩行ロボットです.
「TITAN-XIII」が最後のシリーズだと思っていたのに,まだ続くんですね
設計,製作は主に藤岡さんです. 足機構はヘッケンリンクで腕機構はショートロッドタイプです.
このメカな感じがイイですね
僕のほうの仕事は,ほぼ機械工作です.いいメカにはいい加工です.
旋盤,フライス盤で軸やギアを加工しました.


NHKロボコンでは主にアルミを削っていましたが,S45Cは硬くて大変でした.切粉が熱いとか,油の湯気がでるとか,
旋盤の中ぐり加工もやってみました.なかなか良い経験になったと思います.
機械工作では加工の手順やだんどりが大事と再認識しました.
経験の差で仕上がりに大きな差が出ます.
機械工作をやったことがない人も挑戦してはどうでしょうか.
「TITAN-XIII」が最後のシリーズだと思っていたのに,まだ続くんですね
設計,製作は主に藤岡さんです. 足機構はヘッケンリンクで腕機構はショートロッドタイプです.
このメカな感じがイイですね
僕のほうの仕事は,ほぼ機械工作です.いいメカにはいい加工です.
旋盤,フライス盤で軸やギアを加工しました.


NHKロボコンでは主にアルミを削っていましたが,S45Cは硬くて大変でした.切粉が熱いとか,油の湯気がでるとか,
旋盤の中ぐり加工もやってみました.なかなか良い経験になったと思います.
機械工作では加工の手順やだんどりが大事と再認識しました.
経験の差で仕上がりに大きな差が出ます.
機械工作をやったことがない人も挑戦してはどうでしょうか.