こんにちは、機械知能システム科のおにぎり(@manami1433)です。
ロボット技術研究会は、先週の火,水曜日に 新入生への宣伝も兼ねて展示会を行いました。
多くの方が見学に来ていただいて、教室は大いに盛り上がりました。

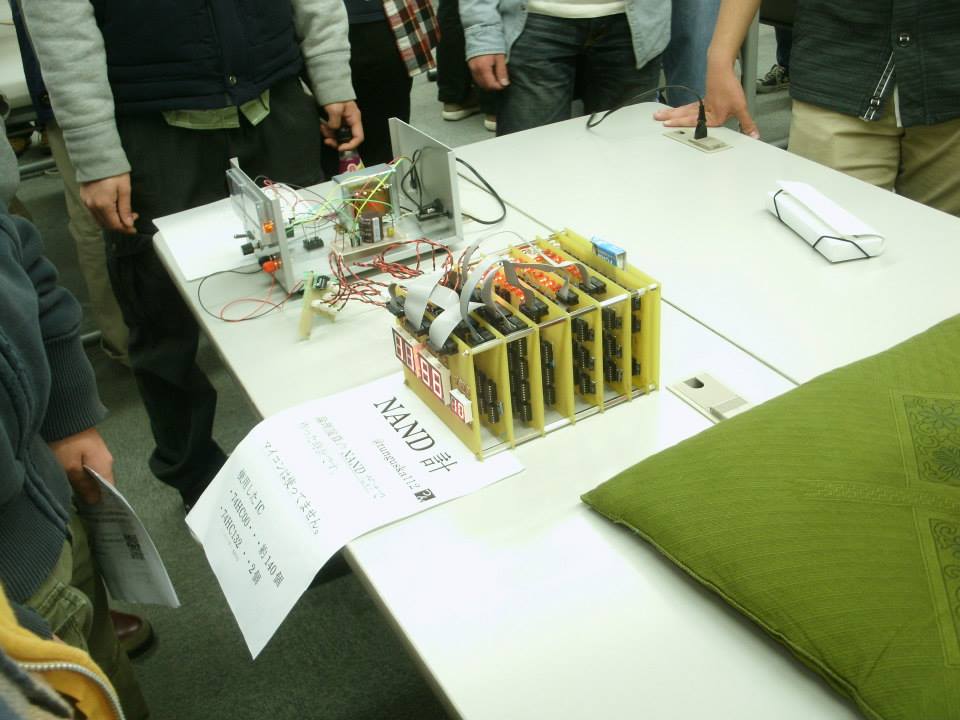
↑大盛況! 中には他大のものつくり系サークルの人もいたり。







↑展示してたものの一部。ロボット、ゲーム、回路など様々。
来てくれた方、ありがとうございました!
今回来れなかった方も、部室に来ていただければ見れるかも?
また、今後のロ技研の新歓イベントとしては、
4/16(水) 回路製作会 @W631
4/17(木) 新歓コンパ @第一食堂
4/23(水) rogyゼミ @W641
があります。いずれも参加費は無料なのでぜひ参加してみてくださいね。
ロボット技術研究会は、先週の火,水曜日に 新入生への宣伝も兼ねて展示会を行いました。
多くの方が見学に来ていただいて、教室は大いに盛り上がりました。

↑大盛況! 中には他大のものつくり系サークルの人もいたり。


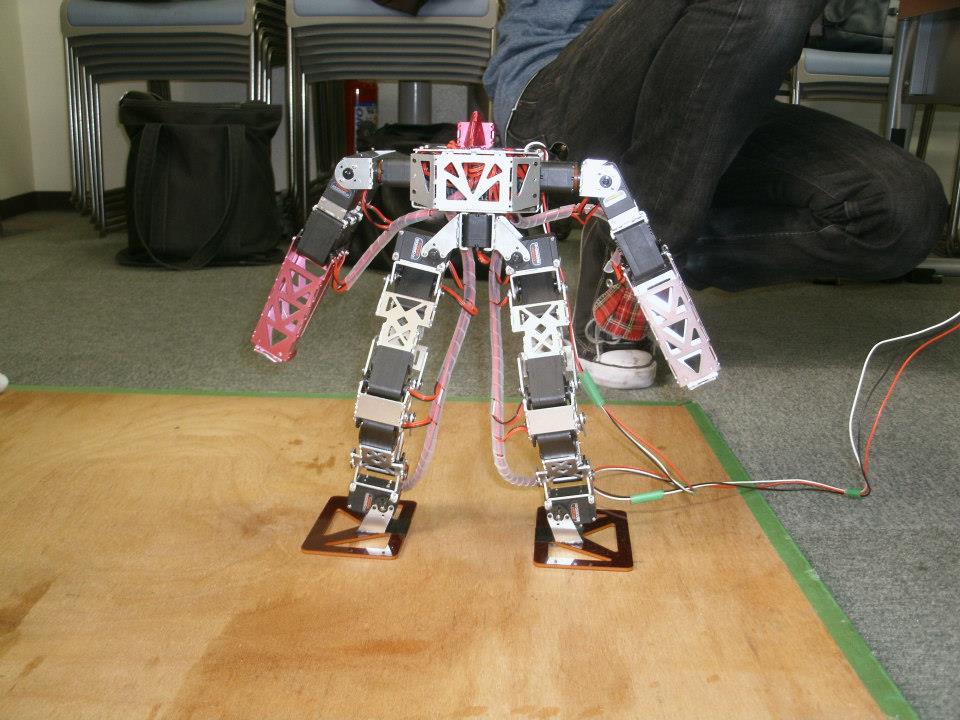



↑展示してたものの一部。ロボット、ゲーム、回路など様々。
来てくれた方、ありがとうございました!
今回来れなかった方も、部室に来ていただければ見れるかも?
また、今後のロ技研の新歓イベントとしては、
4/16(水) 回路製作会 @W631
4/17(木) 新歓コンパ @第一食堂
4/23(水) rogyゼミ @W641
があります。いずれも参加費は無料なのでぜひ参加してみてくださいね。