こんにちはたのしいロボット帝国の髙田です。
今年度もよろしくお願いします。
さて、春休みの進捗報告をさせていただきます。
ビスマスさんからステッピングモーターをもらったので、
マイクロマウスを始めてみました。

マイクロマウスというと、DCモーターで高速で移動し、エンコーダー、ジャイロセンサがのっているものを想像すると思いますが、
私のマウスはステッピングモーターで移動します。
ステッピングモーターは回転角を指定できるので、「1マス分進む」といったことがセンサによるフィードバックなしである程度達成できます。
壁を検知するセンサもフォトリフレクタを買ってきてそいっ!と付けました。
制御用のマイコンはATmega168Pです。
今のところ、制御は左手法により、左側の壁を伝っていくだけです。
それでも、マウスが走っているのを見ているとなかなか楽しいものがあります。
ついでですが、
こちらはクモ型ロボット「VORAS」です。
tokoroさんからお借りしました。
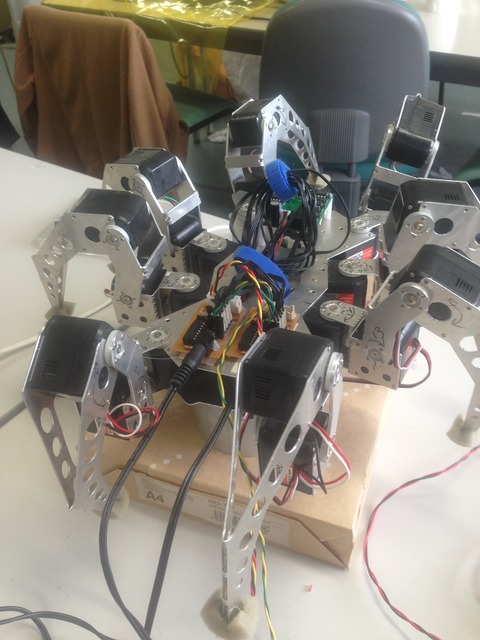
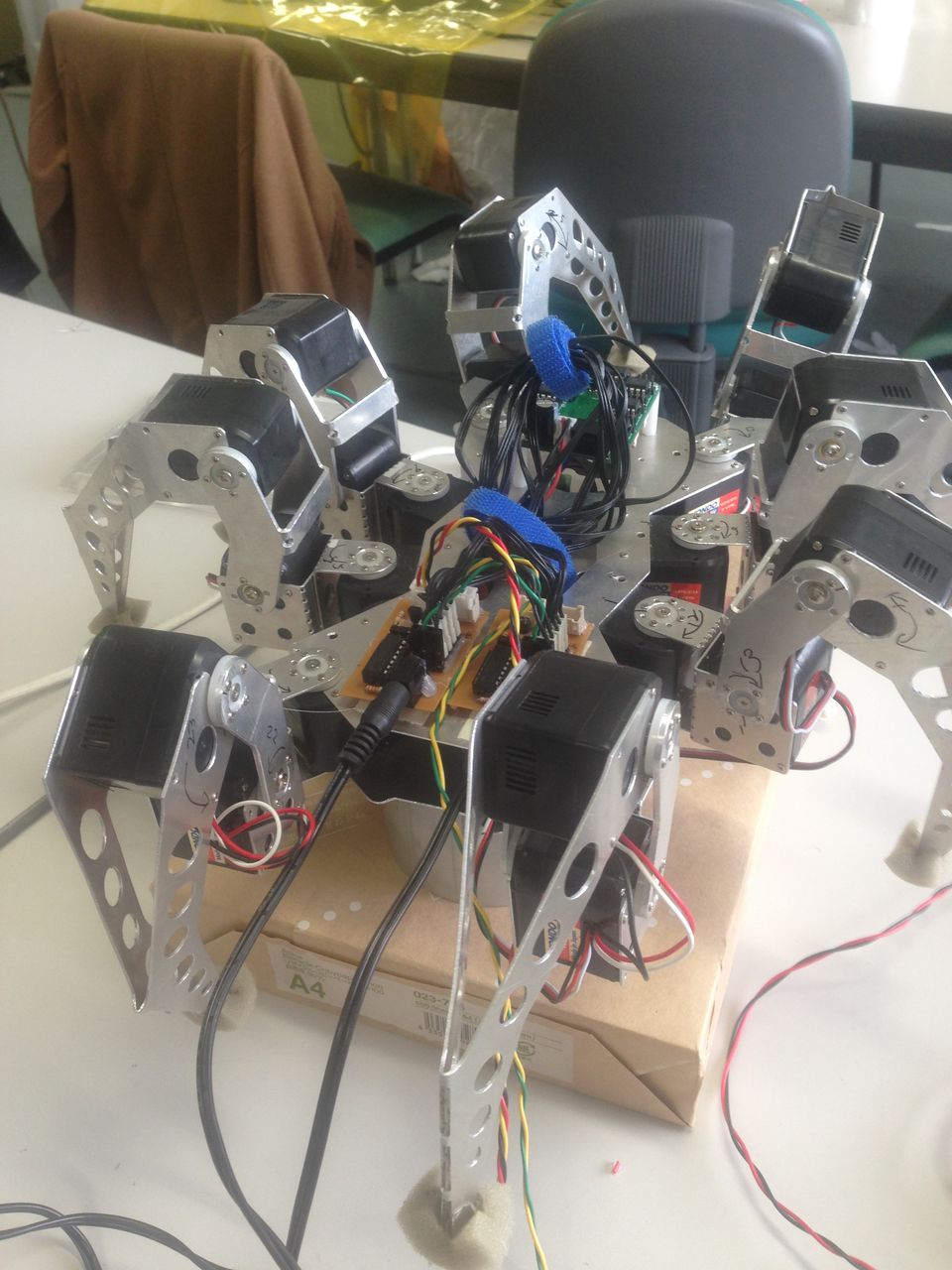
シリアルサーボKRS4013HVが24個のってます。
ACアダプタ2個から給電し、シリアル通信で制御します。
今後の進展に期待してください。









